Product Detail
副标题
[抓取能力约为2秒/回]
IRB-460 技术参数
主要应用
码垛、拆垛、物料搬运
动作轴
4轴
抓手
夹板式、 抓取式 、吸盘式以及其他种类
码垛负载(含抓手)
Max 110kg
码垛能力(循环/小时)
110kg时**2040次、60kg时**2190次
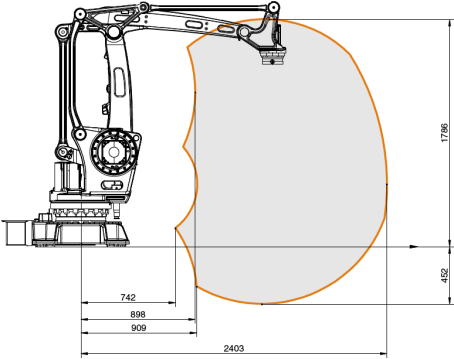
**延伸长度
2400mm
**码垛高度
2238mm
动作范围
轴1(旋转)
-165°~+165°
轴2(下臂)
-40°~+85°
轴3(上臂)
-20°~+125°
轴4(腕部)
-300°~+300°
**速度
145°/s
110°/s
120°/s
400°/s
重复定位精度
±0.20mm
重复循环精度
±0.11mm
电源电压
200~600V,50~60Hz
功率(不含周边设备)
ISO cube 3.67kw
本体自重(不含抓手、底座)
925kg
机器人底座尺寸
1007×720mm
环境
操作时
0°~45℃
运输储存时
-25°~ +55℃
短时间内(不超过24小时)
可达+75℃
相对湿度
最高 95%
噪音水平
< 70dB(A)
安全
带监控、急停和安全功能的双回路,3位气动装置
辐射
EMC/EMI 屏蔽
工作范围:
缩短节拍时间:
IRB460 是全球最快的四轴多功能工业机器人,能显著缩短各项作业的节拍时间,大幅提升生产效率。这款紧凑型的4 轴机器人到达距离为2.4 m,有效荷重110 kg;荷重60 kg 条件下的操作节拍最高可达2190 次循环/ 小时(400mm×2000mm×400mm), 比类似条件下的竞争产品快15% 。
高精度运行:
配套ABB 专利的运动控制软件QuickMoveTM 和TrueMoveTM ,IRB 460 动作平稳,路径精度优异,即使对最敏感的产品,也能悉心“呵护”,同时确保节拍时间不受影响。
占地小,产出高:
与速度、荷重接近的同类产品相比,采用紧凑化设计的IRB 460 与货盘之间的距离可缩短20%,仅此一项便能提升生产效率达3% 。
软件操作简单:
最具革命性的ABB新开发的软件——RobotStudio Palletizing PowerPac。该软件以PC机为运行平台,在定制码垛方案时可用于ABB机器人及抓料器的配置、模拟和编程,对用户是否具备机器人编程经验几乎无任何要求。



{kind=link}